games101系列(6) 加速结构
前言
前面介绍了光线追踪的基本原理,结合光线追踪的特点,可以想到光线追踪有一个很明显的缺点,那就是速度太慢了。为了加速光线追踪的渲染过程,提出包围体积(Bounding Volumes)加速求交点,并且在作业中,我们会将这项技术应用到光线追踪上。
Bounding Volumes
其实前面光栅化的时候,我们已经介绍过类似的思想了,在对每个像素进行遍历求三角形内外的时候,我们也是用一个包围盒确定要计算的像素,避免每次对很多像素进行计算。而这项技术的做法和名字相同,就是用一个盒子将一个等待求交点的物体包围起来,这样一来我们先判断光线会不会与这个盒子相交,再判断会不会与物体相交,所以这里先介绍如何求一个物体的包围盒。
Axis-Aligned Bouding Box
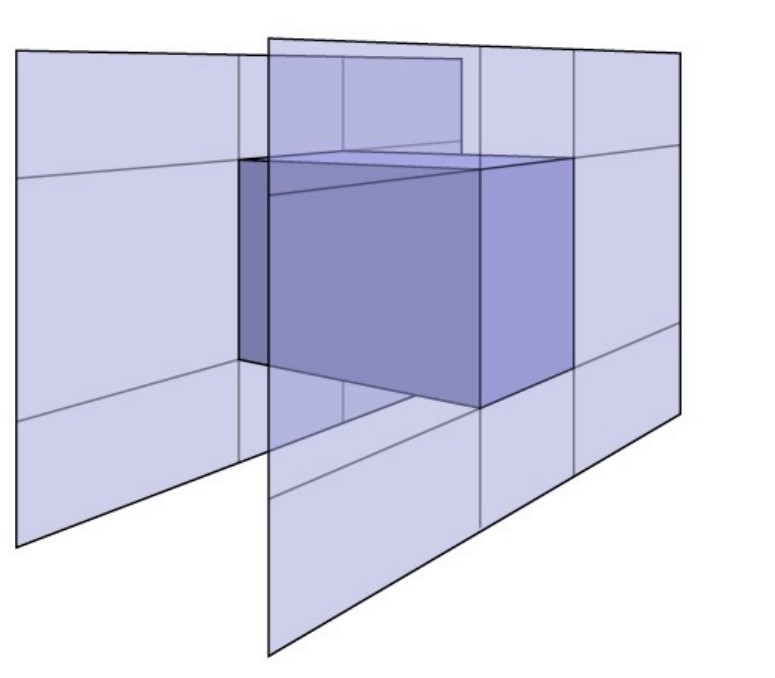
这种AABB盒子就是我们说的包围盒,它实际上是一个长方体,那么我们当然想到,确定这个长方体只需要六个值:上下、左右、前后,实际上也就是通过这六个值来表示长方体的。不过如何用这六个值进行求交才是重点,我们先来看看二维的情况。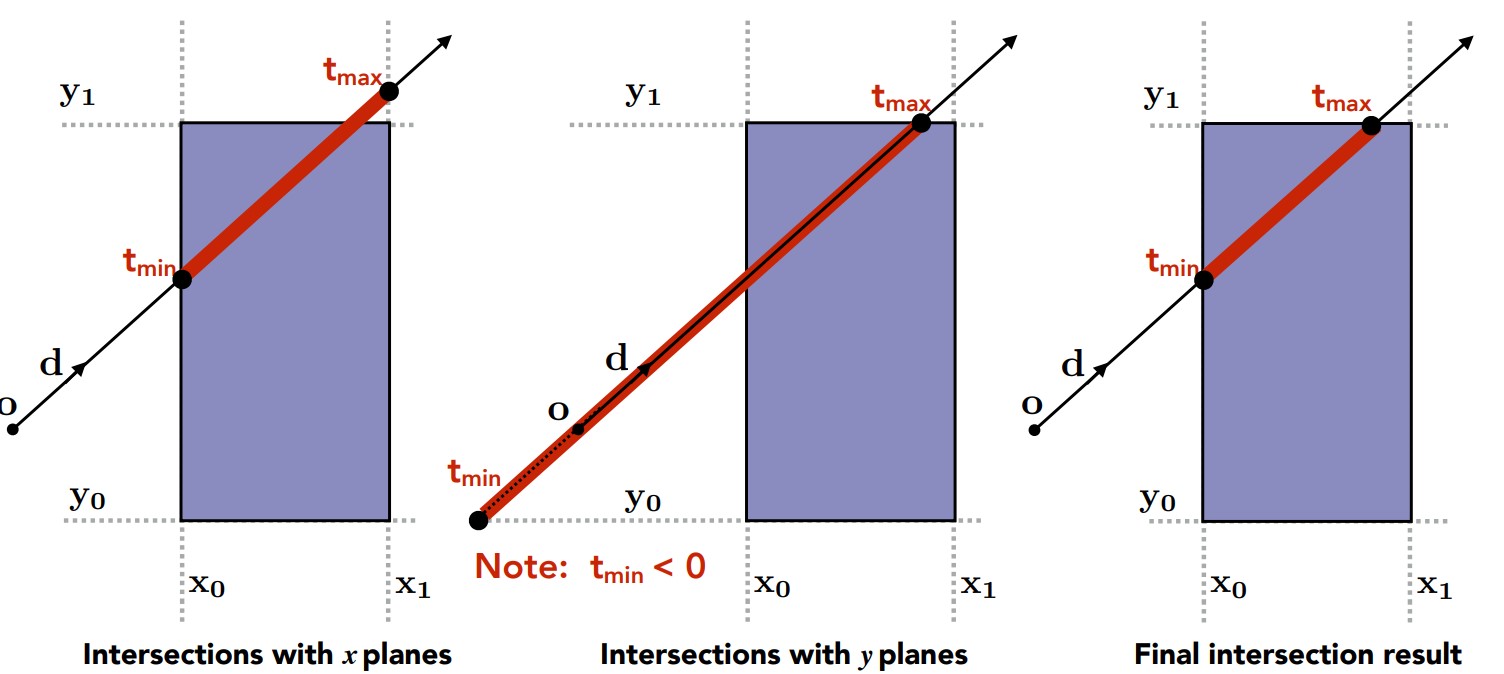
仍然使用前面的光线模型,对包围盒求光线与盒子x值与y值的交点,暂时用tmin和tmax表示,如上图。当然,对x值求交点得到了一组[tmin,tmax],通过对y值求交点又得到了一组[tmin’, tmax’],而实际上我们需要的是光线什么时候最早进入盒子,什么时候又从盒子最晚出去,所以对这两组中的t,tmin取最大值,tmax又取最小值,也就是两个区间求交集,最后得到一组最终的t,记为[tEnter,tExit]。
在三维空间中,我们也采取相同的做法,tEnter=max(tmin),tExit=min(tmax)。求这两个t值就可以进行求交的判断了,可以发现以下条件:
- tEnter<tExit,这是有交点的必要情况;
- tExit<0,说明光源在盒子外面,而且光线经过反向延长才离开盒子,所以光线实际上没有交点;
- tEnter<0 && texit>=0,这时光源就在盒子内部,也是有交点的;当然如果tEnter>=0,光源就在盒子上或者盒子外部。
总结三种情况,可以发现当且仅当tEnter
而之所以不直接求光线和长方体面的交点,也是为了加快速度。
Accelerating
上面介绍了如何使用一个包围盒,现在实际考虑在光线追踪上应用,这其实有很多方法,并不是直接对所有的包围盒求交点,而是将空间划分成不同的区域,这样才能进一步加速,根据光线的位置找出可能相交的少部分包围盒。介绍两种方法,均匀划分(Uniform grids)和空间划分(Spatial partions)。
Uniform grids
你可能注意到了,前面并没有说对某个物体如何求包围盒,因为这并不需要,在均匀划分中,首先是要找到一整个场景的包围盒,然后将这个包围盒分成均匀的块,每个块也是一个包围盒,这样找到那些存在物体的块(内部当然不计算)并存储起来,称为cell,每次对这些cell进行判断就行了。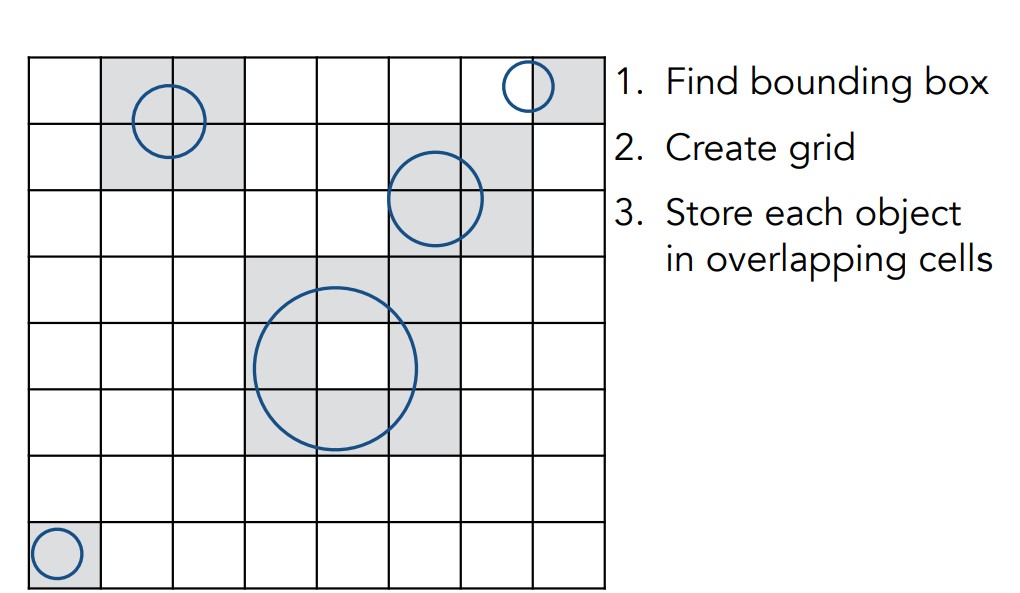
当一条光线进入场景,用前面的方法找到光线相交的这些块,如果光线进入了一个cell,那就进一步判断光线是否和物体有交点(就是前一个作业的三角形求交Moller Trumbore Algorithm)。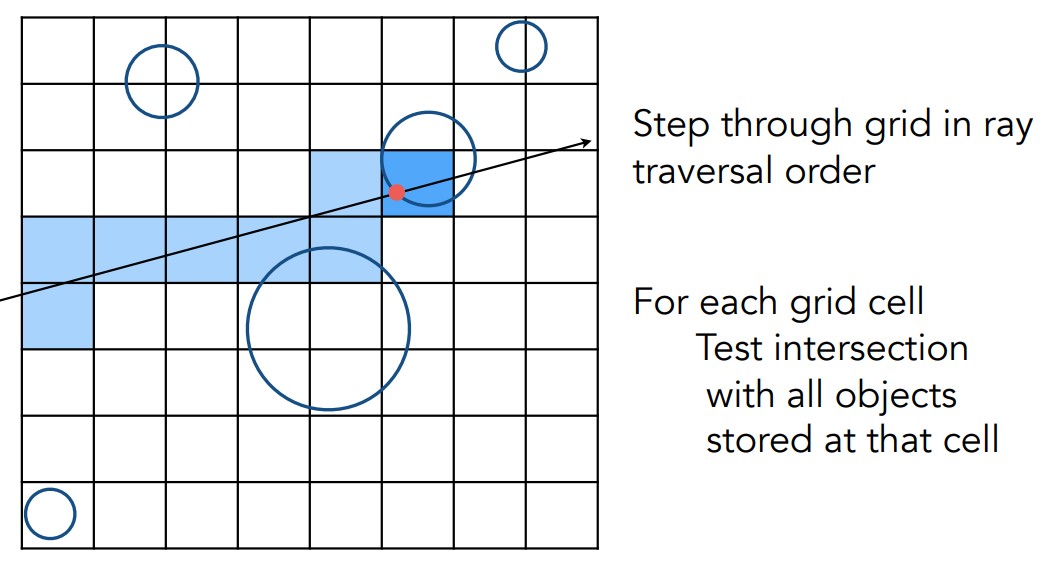
如图,前面浅蓝色格子计算的都是包围盒,只有最后一个深蓝色的格子是cell,需要计算物体的交点。这样,就可以加快计算速度了。
Spatial Partitions
上面那种做法显然造成了浪费,在一些没有物体的地方显然没有必要分这么多格子,所以就提出了一些划分空间的做法。
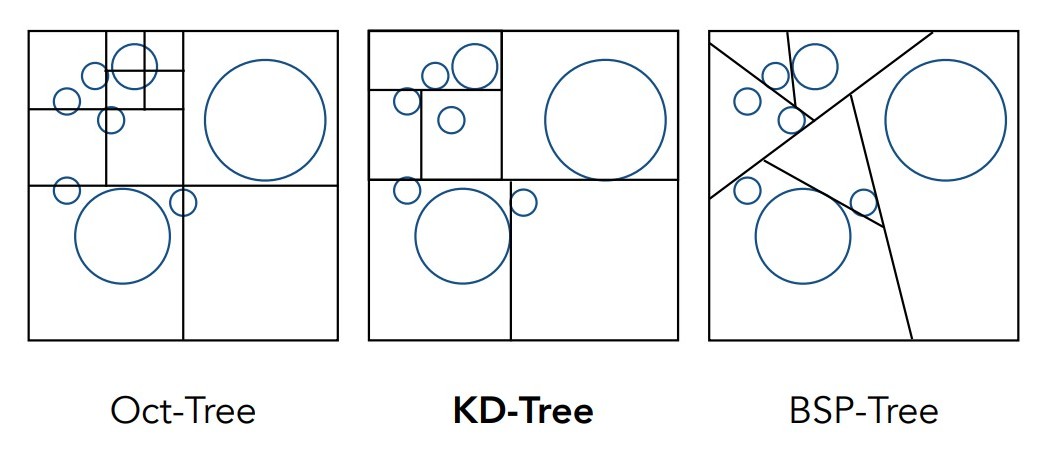
- 八叉树,递归地划分一个正方体,第一个图那样,存在物体的地方就进行递归,直到划分到需要的程度,不过这样会造成存储空间指数上升;
- KD-Tree,同样是递归划分,不过每次只朝一个轴划分,例如上面第二个图,先在X轴划分一次,然后对下面的物体在Y轴再次划分;上面的物体Y轴划分后,重新在X轴划分;
- BSP-Tree,与KD-Tree类似,不过不要求轴对齐划分,任意选择方向。
下面重点介绍KD-Tree,它的存储方式是下面这样: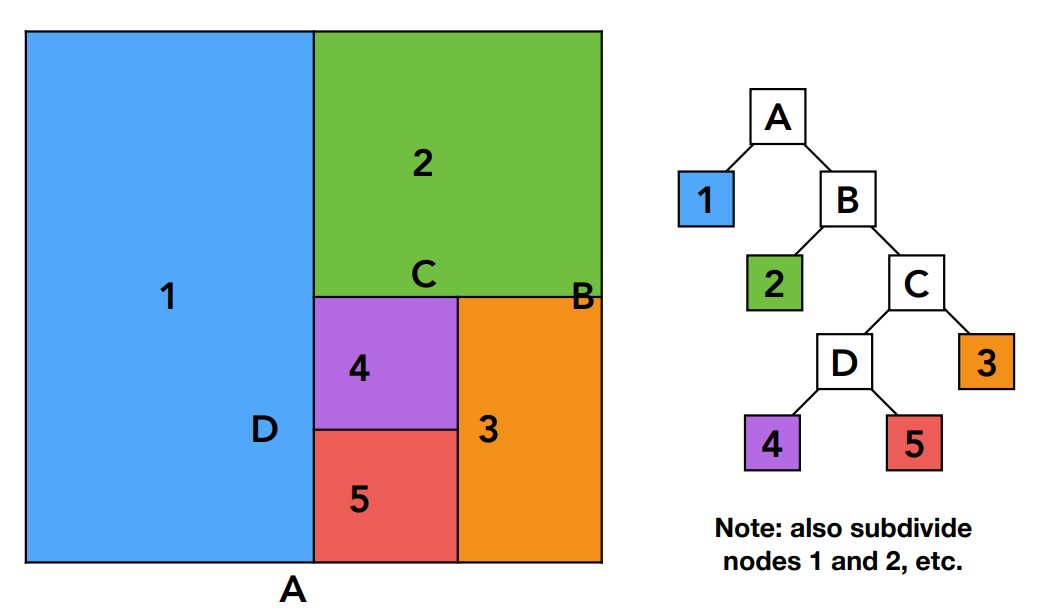
存储也是递归的过程,叶子结点一定是具体的包围盒,而非叶子结点一定被划分成叶子结点,所以不存储实际物体。
在递归遍历的时候,从根结点开始找到每个光线穿过的根结点代表的盒子的tmin和tmax,判断是否穿过盒子,如果盒子还有孩子结点,进一步判断是否穿过了孩子结点指向的包围盒,以此类推,最后判断这些结点里面的物体是否和光线相交。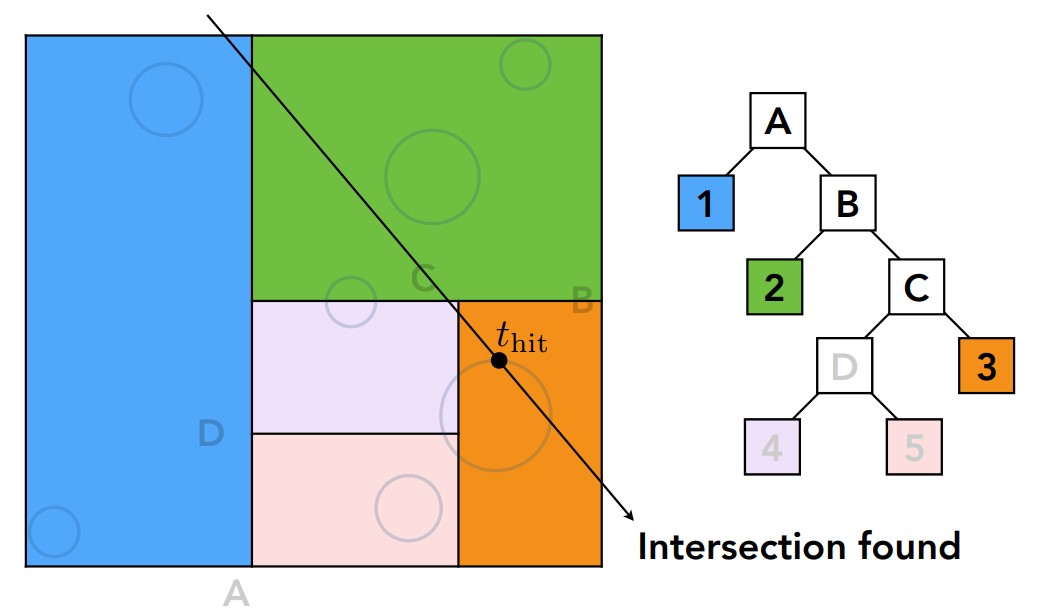
做法的缺点:
- 可能一个叶子结点重复存储了一个物体,如果这个物体同时在几个包围盒中;
- 三角形与包围盒求交点比较困难,导致物体不好判断存储在哪里;
要解决这两个问题都很困难,所以,现在介绍一种通过物体划分的方法。
Object Partitions
通过这种方式得到的就是BVH(Bounding Volume Hierarchy),我们仍然从整个场景的包围盒出发,然后将这个场景中的物体不断划分成两部分,分别计算这两部分物体的包围盒,直到划分得到的最小包围盒中物体数量达到一定要求。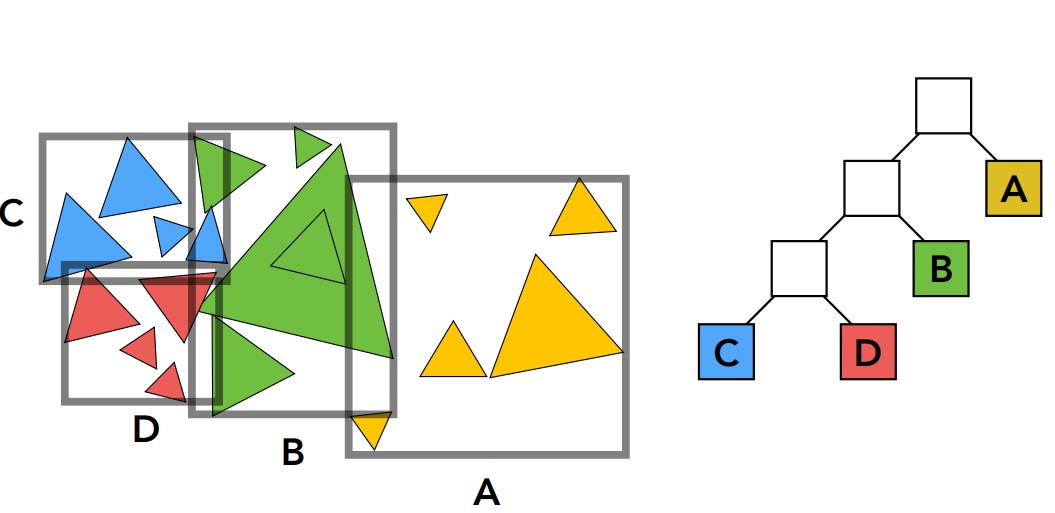
现在的划分方式又有两个特点:存储不会重复了,但是包围盒边界可能会有交集。而遍历的算法则与上面KD-Tree相似。
作业
本次作业依然是光线追踪的框架,要求实现与AABB包围盒求交算法以及刚刚介绍的BVH求交算法。
引用代码改动
有部分需要用到之前作业写的函数,不过需要简单改动。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36inline Intersection Triangle::getIntersection(Ray ray)
{
Intersection inter;
if (dotProduct(ray.direction, normal) > 0)
return inter;
double u, v, t_tmp = 0;
Vector3f pvec = crossProduct(ray.direction, e2);
double det = dotProduct(e1, pvec);
if (fabs(det) < EPSILON)
return inter;
double det_inv = 1. / det;
Vector3f tvec = ray.origin - v0;
u = dotProduct(tvec, pvec) * det_inv;
if (u < 0 || u > 1)
return inter;
Vector3f qvec = crossProduct(tvec, e1);
v = dotProduct(ray.direction, qvec) * det_inv;
if (v < 0 || u + v > 1)
return inter;
t_tmp = dotProduct(e2, qvec) * det_inv;
// TODO find ray triangle intersection
//下面是没有给出的部分
if(t_tmp < 0)
return inter;
inter.happened = true;
inter.distance = t_tmp;
inter.m = m;
inter.obj = this;
inter.normal = normal;
inter.coords = ray(t_tmp);
return inter;
}
回顾前面的三角形求交算法,该函数中已经求出克莱默法则解中的t(t_tmp),b1(u),b2(v),而且前面限制了u,v的取值,所以条件只要求t非负了。Intersection是一个记录数据的结构体,将求出的各种值赋值给对应的变量即可;如果前面几个if判断没有相交,将直接返回,不进行赋值(使用默认值)。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34void Renderer::Render(const Scene& scene)
{
std::vector<Vector3f> framebuffer(scene.width * scene.height);
float scale = tan(deg2rad(scene.fov * 0.5));
float imageAspectRatio = scene.width / (float)scene.height;
Vector3f eye_pos(-1, 5, 10);
int m = 0;
for (uint32_t j = 0; j < scene.height; ++j)
{
for (uint32_t i = 0; i < scene.width; ++i)
{
float x = (2 * (i + 0.5) / scene.width - 1) * scale * imageAspectRatio;
float y = -(2 * (j + 0.5) / scene.height - 1) * scale;
Vector3f dir = normalize(Vector3f(x, y, -1));
//下面两行有所改动
Ray ray(eye_pos,dir);
framebuffer[m++] = scene.castRay(ray,0);
}
UpdateProgress(1.f);
}
// save framebuffer to file
FILE* fp = fopen("binary.ppm", "wb");
(void)fprintf(fp, "P6\n%d %d\n255\n", scene.width, scene.height);
for (auto i = 0; i < scene.height * scene.width; ++i) {
static unsigned char color[3];
color[0] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].x));
color[1] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].y));
color[2] = (unsigned char)(255 * clamp(0, 1, framebuffer[i].z));
fwrite(color, 1, 3, fp);
}
fclose(fp);
}
这个函数的改动是castRay函数变成类Scene的一个方法了,而且输入中第一个参数变成了光线类Ray,找到Ray的构造函数输入参数即可得到ray,然后作为投射光线函数的参数。
AABB包围盒求交
1 | inline bool Bounds3::IntersectP(const Ray& ray, const Vector3f& invDir, |
现在正式进入函数的编写,AABB包围盒的参数通过定义的变量pMin和pMax得到,两者分别记录了包围盒三个轴坐标的最小、最大值,按照前面的方法,我们首先要求出光线和三个轴相交的tmin和tmax值,这一步很简单,光线方程为O+t*d=x/y/z,也就是t=(x/y/z-O.x/y/z)/d,这里第一个x/y/z就是包围盒的六个参数(上下,左右,前后),O是光源位置(ray.origin),d则是光线方向dir,注释中说明使用乘法比除法快,所以计算的时候我们直接乘以dir的倒数invdir,对应轴进行对应坐标的计算,得到三组t值。
之后还要进行一个判断,dirIsNeg记录了三个轴上方向向量的正负,因为我们计算交点的t值时,当方向为正都是从小到大的t满足条件,即tEnter
递归求BVH交点
1 | Intersection BVHAccel::getIntersection(BVHBuildNode* node, const Ray& ray) const |
这是一个递归的函数,遍历的方式是对一棵链式存储的二叉树进行遍历,访问函数就是调用前面编写的求box交点函数IntersectP,该函数需要的参数都在前面计算了,如果该结点是一个叶子结点,而且光线与这个叶子结点代表的包围盒相交了,那么就应该再与叶子结点存储的物体求交点,这里调用了一个同名的方法。
要注意的是,最后要返回一个求交结果的结构体,根据递归光线追踪的原理,每次光线投射时找到最近的那个交点即可,所以在所有这些子树返回的结果中,应该找到t值最小的那个交点的结构体,因此在返回的时候加上一个判断条件,将最近的交点返回。
结果